- Research
- Open access
- Published:
The modified split generalized equilibrium problem for quasi-nonexpansive mappings and applications
Journal of Inequalities and Applications volume 2018, Article number: 122 (2018)
Abstract
In this paper, we introduce a new problem, the modified split generalized equilibrium problem, which extends the generalized equilibrium problem, the split equilibrium problem and the split variational inequality problem. We introduce a new method of an iterative scheme \(\{x_{n}\}\) for finding a common element of the set of solutions of variational inequality problems and the set of common fixed points of a finite family of quasi-nonexpansive mappings and the set of solutions of the modified split generalized equilibrium problem without assuming a demicloseness condition and \(T_{\omega }:= (1-\omega)I+ \omega T\), where T is a quasi-nonexpansive mapping and \(\omega \in ( 0,\frac{1}{2} ) \); a difficult proof in the framework of Hilbert space. In addition, we give a numerical example to support our main result.
1 Introduction
Let C be a nonempty closed convex subset of a real Hilbert space H. The set of fixed points of T is denoted by \(F(T)\). The mapping \(T: C \rightarrow C\) is said to be quasi-nonexpansive if
for all \(x\in C\) and \(p\in F(T)\).
Definition 1.1
([1])
Let \(T:H \rightarrow H\). Then the following are equivalent:
-
1.
T is firmly nonexpansive,
-
2.
\(\Vert Tx-Ty \Vert ^{2} \leq \langle x-y, Tx-Ty \rangle\), \(\forall x,y \in H\),
-
3.
\(\langle Tx-Ty, (I-T)x-(I-T)y \rangle \geq 0\), \(\forall x,y \in H\).
Let \(A:C \rightarrow H\) be a mapping. The variational inequality is to find a point \(u \in C\) such that
for all \(v \in C\). The set of solutions of (1.1) is denoted by \(VI(C,A)\). A mapping \(A: C \rightarrow H\) is called α-inverse strongly monotone if there exists a positive real number \(\alpha > 0\) such that
for all \(x,y \in C\). They have been investigated in the literature; see, for example, [2, 3]. Let F be a bifunction of \(C\times C\) into \(\mathbb{R}\), where \(\mathbb{R}\) is the set of real numbers. The equilibrium problem for \(F:C\times C \rightarrow \mathbb{R}\) is to find \(x \in C\) such that
The set of solutions of (1.2) is denoted by \(EP ( F ) \). Equilibrium problems were introduced by [4] in 1994 and included many well-known problems such as variational inequality, optimization problem, nonexpansive mapping and fixed point problem; see, for example, [5–8].
Let F be a function of \(C\times C\) into \(\mathbb{R}\) and let \(f:H \rightarrow H\) be a mapping. The generalized equilibrium problem is to find \(x\in C\) such that
for all \(y\in C\). The set of solutions of (1.3) is denoted by \(EP(F,f)\). When \(f\equiv 0\), \(EP(F,f)\) is denoted by \(EP(F)\) and \(F\equiv 0\), \(EP(F,f)\) is denoted by \(VI(C,f)\).
Throughout this section, let \(H_{1}\), \(H_{2}\) be real Hilbert spaces and let C, Q be nonempty closed convex subsets of real Hilbert spaces \(H_{1}\) and \(H_{2}\), respectively. Let \(A:H_{1} \rightarrow H_{2}\) be a bounded linear operator.
In 1994, Censor and Elfving [9] introduced the split feasibility problem (in short, SFP) which is to find a point \(x \in C\) such that \(Ax \in Q\). The set of all solutions of split feasibility problem is denoted by \(\varphi = \{x \in C: Ax \in Q\}\).
To solve the SFP, Byrne [10] introduced CQ algorithm whose sequence \(\{x_{n}\}\) is generated by
where the initial \(x_{0} \in H_{1}\) and \(\gamma \in (0, 2/L)\), L is the spectral radius of the operator \(A^{*}A\) and \(A^{*}\) is the adjoint of A. Then the CQ algorithm converges to a solution of the SFP, whenever solutions exist. If there are no solutions of the SFP, the CQ algorithm converges to a minimizer of the function
whenever such minimizers exist.
Let \(U:H_{1} \rightarrow H_{1}\) and \(T: H_{2} \rightarrow H_{2}\) be two nonlinear operators. The split common fixed points problem (SCFPP) [11, 12] is to find a point \(x^{*}\) such that
The solution set of SCFPP is denoted by \(\Phi =\{p^{*}\in F(U): Ap^{*}\in F(T)\}\). The split common fixed point problem is a generalization of the split feasibility problem.
In 2017, Wang [13] introduced a new method for solving SCFPP as follows:
where \(\rho _{n} \subset (0,\infty)\) is chosen such that
and U and T are firmly quasi-nonexpansive mappings. Then the sequence \(\{x_{n}\}\) converges weakly to z, where \(z=\lim_{n \rightarrow \infty }P_{\Phi }x_{n}\).
Censor et al. [11, 14] introduced the prototypical split inverse problem (SIP) which is a generalization of the split common fixed points problem. In this, there are given two vector spaces X and Y and a linear operator \(A:X \rightarrow Y\). In addition, two inverse problems are involved. The first one, denoted IP1, is formulated in the space X and the second one, denoted IP2, is formulated in the space Y. Given these data, the split inverse problem is formulated as follows:
and such that
This problem is used in many modeling arising in sensor networks, radiation therapy treatment planning, color imaging, etc.
The split equilibrium problem (SEP) [12] is to find \(\widehat{x}\in C\) such that
and such that
where \(F_{1}:C\times C\rightarrow \mathbb{R}\) and \(F_{2}:Q\times Q \rightarrow \mathbb{R}\) be nonlinear bifunctions. If we consider only problem (1.7), it is the equilibrium problem and we denoted its solution set by \(EP(F_{1})\). The solution set of SEP is denoted by \(\Gamma = \{\widehat{p} \in EP(F_{1}): A\widehat{p} \in EP(F_{2})\}\). SEP is reduced to \(EP(F)\), where \(H_{1}\equiv H_{2}\), \(F_{1} \equiv F _{2}\) and \(A\equiv I\). \(EP(F)\) is an unifying model for several problems arising in physics, engineering, science, optimization, economics, etc.
The split variational inequality problems (in short, SVIP) were introduced and studied by Cencor et al. [11]: find \(\overline{x} \in C\) such that
and such that
where \(f_{1}:C\rightarrow H_{1}\) and \(f_{2}:Q\rightarrow H_{2}\) are nonlinear mappings. The solution set of SVIP is denoted by \(\Psi = \{ \overline{p} \in VI(C,f_{1}): A\overline{p} \in VI(Q,f_{2})\}\). The split variational inequality problems have already been studied and used in practice as a model in intensity-modulated radiation therapy (IMRT) treatment planning; see, for example, [15] and the modeling of many inverse problems arising for phase retrieval and other real-world problems; for instance, in sensor networks in computerized tomography and data compression; see, for example, [16, 17].
By investigating SEP and SVIP, we introduce the modified split generalized equilibrium problem (MSGEP) which is to find \(x^{*} \in C\) such that
and such that
where \(F_{1}:C\times C\rightarrow \mathbb{R}\) and \(F_{2}:Q\times Q \rightarrow \mathbb{R}\) are nonlinear bifunctions and \(f_{1}: C \rightarrow H_{1}\) and \(f_{2}: Q \rightarrow H_{2}\) are nonlinear mappings. The solution set of MSGEP is denoted by \(\Omega =\{p^{*} \in EP(F_{1},f_{1}): Ap^{*}\in EP(F_{2},f_{2})\}\).
Remark 1.1
-
1.
If we put \(f_{1} \equiv f_{2} \equiv 0\) in MSGEP then the MSGEP is reduced to SEP.
-
2.
If we put \(F_{1} \equiv F_{2} \equiv 0\) in MSGEP then the MSGEP is reduced to SVIP.
-
3.
In the case of bifunctions \(F_{1}\) and \(F_{2}\) are according to (A1)–(A4). From (1.11), (1.12) and Lemma 2.2, we have \(x^{*} \in F(T^{F_{1}}_{r} ( I-rf_{1} ))\) and \(Ax^{*} \in F(T^{F_{2}}_{s} ( I-sf_{2} ))\), for all \(r, s>0\). So, MSGEP can be viewed as SCFPP.
MSGEP is a generalization of the generalized equilibrium problem, the split equilibrium problem and the split variational inequality problem. So, this problem can be used in sensor networks, data compression, practice as a model in intensity-modulated radiation therapy (IMRT) treatment planning, robustness to marginal changes and equilibrium stability etc.
Example 1.2
Let \(H_{1}=[0, 6]\), \(H_{2}=[0, 18]\), \(C=[2, 5]\) and \(Q=[6, 10]\). Let \(A : H_{1} \rightarrow H_{2}\) be defined by \(Ax = 3x\) for all \(x \in H_{1}\). Let the mapping \(F_{1}: C \times C \rightarrow \mathbb{R}\) be defined by
and \(F_{2}: Q \times Q \rightarrow \mathbb{R}\) be defined by
Let the mapping \(f_{1}: C \rightarrow H_{1}\) be defined by \(f_{1}x = \frac{x-2}{9}\), \(\forall x\in C\) and the mapping \(f_{2}: Q \rightarrow H_{2}\) be defined by \(f_{2}x = \frac{x-6}{7}\), \(\forall x\in Q\).
Then \(2 \in \Omega \). Therefore 2 is a solution of MSGEP.
In 2012, Tain and Jin [18] introduced iterative algorithms involving a quasi-nonexpansive mapping. They generated the iterative as follows:
where A is a bounded linear operator on H, T is a quasi-nonexpansive mapping on H, f is a contraction with coefficient a under suitable conditions of the parameters \(\alpha_{n}\), γ and ω. By assuming \(\omega \in ( 0,\frac{1}{2} ) \), \(T_{\omega }:= (1-\omega)I+\omega T\) and T is demiclosed on H.
Motivated by SFP and SVIP, we introduced a new problem, the modified split generalized equilibrium problem, which extends the generalized equilibrium problem, the split equilibrium problem and the split variational inequality problem. Many authors proved strong convergence theorem involving a quasi-nonexpansive mapping T by assuming \(T_{\omega }:= (1-\omega)I+\omega T\) and T is demiclosed on H; a difficult proof. Motivated by [19], we introduced Remark 2.5 and [11, 12] and [18], we introduce a new method of iterative scheme \(\{x_{n}\}\) for finding a common element of the set of solutions of variational inequality problems and the set of common fixed points of a finite family of quasi-nonexpansive mappings and the set of solutions of the modified split generalized equilibrium problem without the condition above in the framework of a Hilbert space.
2 Preliminaries
Let H be a real Hilbert space with inner product \(\langle \cdot, \cdot \rangle \) and norm \(\Vert \cdot \Vert \). Throughout this paper, we use the notations of weak and strong convergence by “⇀” and “→”Opial’s condition [20], i.e., for any sequence \(\{ x_{n} \} \) with \(x_{n} \rightharpoonup x\), the inequality \(\lim_{n \rightarrow \infty } \inf \Vert x_{n}-x \Vert < \lim_{n \rightarrow \infty } \inf \Vert x_{n}-y \Vert \), holds for every \(y \in H\) with \(y \neq x\).
For solving the equilibrium problem, we assume that the bifunction \(F:C\times C\rightarrow \mathbb{R}\) satisfy the following conditions:
-
(A1)
\(F(x,x)=0\) for all \(x\in C\),
-
(A2)
F is monotone, i.e., \(F(x,y)+F(y,x)\leq 0\) for all \(x,y\in C\),
-
(A3)
for each \(x,y,z\in C\), \(\lim_{t \downarrow 0} F ( tz+(1-t)x,y ) \leq F(x,y)\),
-
(A4)
for each \(x\in C\), \(y\mapsto F(x,y)\) is convex and lower semicontinuous.
Lemma 2.1
([4])
Let C be a nonempty closed convex subset of H and let F be a bifunction of \(C \times C\) into \(\mathbb{R}\) satisfying (A1)–(A4). Let \(r>0\) and \(x \in H\). Then there exists \(z \in C\) such that
Lemma 2.2
([21])
Assume that \(F:C\times C\rightarrow \mathbb{R}\) satisfies (A1)–(A4). For \(r >0\), define a mapping \(T_{r}:H\rightarrow C\) as follows:
for all \(x\in H\). Then the following hold:
-
(1)
\(T_{r}\) is single-valued,
-
(2)
\(T_{r}\) is firmly nonexpansive, i.e., for any \(x,y \in H\),
$$\bigl\Vert T_{r}(x)-T_{r}(y) \bigr\Vert ^{2} \leq \bigl\langle T_{r}(x)-T _{r}(y),x-y \bigr\rangle , $$ -
(3)
\(F ( T_{r} ) = EP(F)\),
-
(4)
\(EP(F)\) is closed and convex.
Lemma 2.3
([22])
Let H be a real Hilbert space, let C be a nonempty closed convex subset of H and let A be a mapping of C into H. Let \(u \in C\). Then, for \(\lambda > 0\),
where \(P_{C}\) is the metric projection of H onto C.
Lemma 2.4
Let C be a nonempty closed convex subset of a real Hilbert space H. Let \(\{ T_{i} \} ^{N}_{i=1}\) be a finite family of quasi-nonexpansive mappings of C into H with \(\bigcap^{N}_{i=1} F ( T_{i} ) \neq \emptyset \) and let \(0 < a_{i} < 1 \) with \(\sum^{N}_{i=1}a_{i}=1\). Then
Proof
In this lemma, we show that \(\bigcap^{N}_{i=1} F ( T_{i} ) = \bigcap^{N}_{i=1} VI ( C,I-T _{i} ) \) and \(\bigcap^{N}_{i=1} VI ( C,I-T_{i} ) = VI ( C,\sum^{N}_{i=1}a _{i} ( I-T_{i} ) )\). Lastly, we have
To start with, it is easy to see that \(\bigcap^{N}_{i=1} F ( T_{i} ) \subseteq \bigcap^{N}_{i=1} VI ( C,I-T_{i} )\). Next, we show that \(\bigcap^{N}_{i=1} VI ( C,I-T_{i} ) \subseteq \bigcap^{N}_{i=1} F ( T_{i} )\). Let \(u \in \bigcap^{N}_{i=1} VI ( C,I-T_{i} ) \) and \(\bigcap^{N}_{i=1} F ( T_{i} ) \neq \emptyset\). So, we get \(u \in VI ( C,I-T_{i} )\), \(\forall i=1, 2, \ldots,N\). We may write
There exists \(v^{*}\in C \) such that \(v^{*}=T_{i}v^{*}\), \(\forall i=1, 2, \ldots,N\). Since \(T_{i}\) is a quasi-nonexpansive mapping, \(\forall i=1, 2, \ldots,N\), it follows that
By using (2.1) and (2.2), we conclude that
It implies that \(u \in \bigcap^{N}_{i=1} F ( T_{i} )\). Therefore \(\bigcap^{N}_{i=1} VI ( C,I-T_{i} ) \subseteq \bigcap^{N}_{i=1} F ( T_{i} ) \). Hence
After that, we show \(\bigcap^{N}_{i=1} VI ( C,I-T_{i} ) = VI ( C,\sum^{N}_{i=1}a _{i} ( I-T_{i} ) ) \) where \(0 < a_{i} < 1 \) and \(\sum^{N}_{i=1}a_{i}=1\). Observe that
Therefore \(\bigcap^{N}_{i=1} VI ( C,I-T_{i} ) = VI ( C,\sum^{N}_{i=1}a _{i} ( I-T_{i} ) )\). Hence \(\bigcap^{N}_{i=1} F ( T _{i} ) = VI ( C,\sum^{N}_{i=1}a_{i} ( I-T_{i} ) )\). □
Remark 2.5
From Lemma 2.3 and Lemma 2.4, we have
for all \(\lambda > 0\) and \(0 < a_{i} < 1\) with \(\sum^{N}_{i=1}a_{i}=1\).
Lemma 2.6
([23])
Let \(\{ s_{n} \} \) be a sequence of nonnegative real numbers satisfying
where \(\{ \alpha_{n} \} \) is a sequence in \(( 0,1 ) \) and \(\{ \delta_{n} \} \) is a sequence such that
Then \(\lim_{n \rightarrow \infty } s_{n} = 0\).
3 Main results
Lemma 3.1
Let C and Q be nonempty closed convex subsets of a real Hilbert spaces \(H_{1}\) and \(H_{2}\), respectively. Let \(A:H_{1} \rightarrow H _{2}\) be a bounded linear operator. Let \(F_{1}:C \times C \rightarrow \mathbb{R}\) and \(F_{2}:Q \times Q \rightarrow \mathbb{R}\) be the bifunctions satisfying (A1)–(A4). Let \(f_{1}: H_{1} \rightarrow H _{1}\) be a ρ-inverse strongly monotone mapping and \(f_{2}: H _{2} \rightarrow H_{2}\) be a firmly nonexpansive mapping. Then
-
1.
\(T^{F_{1}}_{r}(I-rf_{1})\) and \(T^{F_{2}}_{s} ( I-sf_{2} ) \) are nonexpansive mapping,
-
2.
$$\begin{aligned} &\bigl\Vert T^{F_{1}}_{r} ( I-rf_{1} ) \bigl( p+ \gamma A^{*} \bigl( T^{F_{2}}_{s} ( I-sf_{2} ) -I \bigr) Ap \bigr) \\ &\qquad {}- T^{F_{1}}_{r} ( I-rf_{1} ) \bigl( q+ \gamma A^{*} \bigl( T^{F_{2}}_{s} ( I-sf_{2} ) -I \bigr) Aq \bigr) \bigr\Vert ^{2} \\ &\quad \leq \Vert p-q \Vert ^{2}+\gamma (\gamma L-1) \bigl\Vert \bigl( T ^{F_{2}}_{s} ( I-sf_{2} ) -I \bigr) Ap- \bigl( T^{F_{2}}_{s} ( I-sf_{2} ) -I \bigr) Aq \bigr\Vert ^{2}, \end{aligned}$$
for all \(p, q \in C\), where \(r \in (0,2\rho)\), \(s \in (0,1)\), \(\gamma \in (0,1/L)\), L is the spectral radius of the operator \(A^{*}A\) and \(A^{*}\) is the adjoint of A, \(T^{F_{1}}_{r}:H_{1}\rightarrow C\) defined by
for all \(x\in H_{1}\) and \(T^{F_{2}}_{s}:H_{2}\rightarrow Q\) defined by
for all \(\overline{x}\in H_{2}\).
Proof
Let \(p, q \in C\). First, we show 1 is true. Since \(f_{1}\) is a ρ-inverse strongly monotone mapping and \(r \in (0,2\rho)\), we obtain
Thus \(T^{F_{1}}_{r}(I-rf_{1})\) is a nonexpansive mapping. Since \(f_{2}\) is a firmly nonexpansive mapping and \(s \in (0,1)\), we get
for all \(\overline{p}, \overline{q}\in Q\). Therefore \(T^{F_{2}}_{s} ( I-sf_{2} ) \) is a nonexpansive mapping.
Next, we show 2 is true. From Lemma 3.1(1), we have
From the property of \(T^{F_{2}}_{s}\), we get
We have
From (3.2), (3.3) and the property of firmly nonexpansive mapping, we get
That is,
Substituting (3.4) in (3.1), we obtain
□
Lemma 3.2
Let C be a nonempty closed convex subset of a real Hilbert space H and let \(T: C\rightarrow C\) be a quasi-nonexpansive mapping with \(F ( T ) \neq \emptyset \). Then
Proof
Let \(x \in C\) and \(z \in F ( T ) \). Since T is a quasi-nonexpansive mapping, we get
We can conclude that
□
Lemma 3.3
Let C be a nonempty closed convex subset of a real Hilbert space H. Let \(\{ T_{i} \} ^{N}_{i=1}\) be a finite family of quasi-nonexpansive mappings of C into itself with \(\bigcap^{N}_{i=1} F ( T_{i} ) \neq \emptyset \). Then
for all \(x \in C\), where \(0 < k_{i} < 1\) with \(\sum^{N}_{i=1}k_{i}=1\) and \(0 < \overline{\lambda } < 1\).
Proof
Let \(x \in C\) and \(z \in \bigcap^{N}_{i=1} F ( T_{i} ) \). From Remark 2.5 and \(z\in \bigcap^{N}_{i=1} F ( T_{i} ) \), we have \(z \in F ( P_{C} ( I-\overline{\lambda } ( \sum^{N}_{i=1}k_{i} ( I-T_{i} ) ) ) ) \) and \(z=T_{i}z\), \(\forall i=1, 2, \ldots, N\). Since \(P_{C}\) is nonexpansive mapping, \(0 < \overline{\lambda } < 1\) and Lemma 3.2, we have
□
Next, we prove a strong convergence theorem for solving the modified split generalized equilibrium problem (MSGEP).
Theorem 3.4
Let C and Q be nonempty closed convex subsets of a real Hilbert spaces \(H_{1}\) and \(H_{2}\), respectively. Let \(A:H_{1} \rightarrow H _{2}\) be a bounded linear operator. Let \(D_{1}, D_{2}:C \rightarrow H _{1}\) be α, β-inverse strongly monotone mappings, respectively. Let \(F_{1}:C \times C \rightarrow \mathbb{R}\) and \(F_{2}:Q \times Q \rightarrow \mathbb{R}\) be the bifunctions satisfying (A1)–(A4). Let \(\{ T_{i} \} ^{N}_{i=1}\) be a finite family of quasi-nonexpansive mappings of C into itself with \(\bigcap^{N}_{i=1} F ( T_{i} ) \neq \emptyset \). Let \(f_{1}: H_{1} \rightarrow H_{1}\) be a ρ-inverse strongly monotone mapping and \(f_{2}: H_{2} \rightarrow H_{2}\) be a firmly nonexpansive mapping. Assume \(\mathcal{F}= VI(C,D_{1}) \cap VI(C,D_{2}) \cap \bigcap^{N}_{i=1} F ( T_{i} ) \cap \Omega \neq \emptyset \). For given \(x_{1},u\in C\) and let \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) be sequences generated by
where \(d_{1} \in (0,2\alpha)\), \(d_{2} \in (0,2\beta)\), \(r \in (0,2 \rho)\), \(s \in (0,1)\), \(a \in [0,1]\), \(0 < k_{i} < 1\) with \(\sum^{N}_{i=1}k_{i}=1\), \(\gamma \in (0,1/L)\), L is the spectral radius of the operator \(A^{*}A\) and \(A^{*}\) is the adjoint of A. Also \(\{ \alpha_{n} \}\), \(\{ \beta_{n} \}\), \(\{ \gamma_{n} \}\) are sequences in \([0,1]\) with \(\alpha_{n} + \beta_{n} + \gamma_{n} = 1\) for all \(n \in \mathbb{N}\). Suppose the following conditions hold:
-
(i)
\(\lim_{n \rightarrow \infty } \alpha_{n} =0\) and \(\sum_{n=1}^{\infty } \alpha_{n} = \infty \),
-
(ii)
\(0 < c \leq \beta_{n}, \gamma_{n} \leq d < 1 \) for some \(c, d > 0\) for all \(n \geq 1\),
-
(iii)
\(\sum_{n=1}^{\infty } \lambda_{n} < \infty\) and \(0 < \lambda_{n} < 1 \),
-
(iv)
\(\sum_{n=1}^{\infty } \vert \alpha_{n+1} - \alpha_{n} \vert < \infty\), \(\sum_{n=1}^{\infty } \vert \beta_{n+1} - \beta_{n} \vert < \infty \).
Then \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) converge strongly to \(z=P_{\mathcal{F}}u\).
Proof
Let \(x, y \in C\) and \(z \in \mathcal{F}\). First, we show that \(( I-d_{1}D_{1} ) \) is a nonexpansive mapping. Since \(D_{1}\) is an α-inverse strongly monotone mapping, we obtain
Thus \((I-d_{1}D_{1})\) is a nonexpansive mapping. By using the same method as above, we see that \((I-d_{2}D_{2})\) is a nonexpansive mapping. Since \(f_{1}\) is a ρ-inverse strongly monotone mapping and \(f_{2}\) is a firmly nonexpansive mapping. From Lemma 3.1(1), we have \(( T^{F_{1}}_{r} ( I-rf_{1} ) ) \) and \(( T^{F_{2}}_{s} ( I-sf_{2} ) ) \) are nonexpansive mappings. Since \(z\in \bigcap^{N}_{i=1} F ( T_{i} ) \) and Lemma 3.3, we have
Since \(z \in VI(C,D_{1})\) and \(z \in VI(C,D_{2})\) and using the property of \((I-d_{1}D_{1})\) and \((I-d_{2}D_{2})\), we get
Since \(z \in \Omega \), we have \(z=T^{F_{1}}_{r} ( I-rf_{1} ) z\) and \(Az=T^{F_{2}}_{s} ( I-sf_{2} ) Az\). From Lemma 3.1(2) and \(\gamma \in (0,1/L)\), we obtain
Using the definition of \(x_{n}\), (3.7), (3.9) and (3.11), we get
Using induction, we can conclude that
for all \(n\geq 1\). This implies that the sequence \(\{x_{n}\}\) is bounded and so are \(\{y_{n}\}\) and \(\{u_{n}\}\). From Lemma 3.1 (2) and \(\gamma \in (0,1/L)\), we obtain
Next, we show that \(\lim_{n \rightarrow \infty } \Vert x_{n+1} - x_{n} \Vert =0\). According to Eq. (3.12), we have
where
From condition (i), (iii), (iv) and Lemma 2.6, we have
According to Eqs. (3.7), (3.9) and (3.10), we have
This implies that
By using condition (i) and (3.13), we have
By using the same method as (3.16), we have
Let \(M_{n} = x_{n}+\gamma A^{*} ( T^{F_{2}}_{s} ( I-sf_{2} ) -I ) Ax_{n}\). Applying the inequality (3.11), we have
Using the property of inverse strongly monotone operators and (3.18), we have
Substituting (3.19) in (3.15), we have
That is,
According to condition (i) and (3.13), we get
By the property of firmly nonexpansive mappings, we have
That is,
Substituting (3.22) in (3.15), we get
It follows that
From condition (i), (3.13) and (3.20), we ensure that
From (3.16) and (3.23), we also have
Then we have
By using the same method as (3.19), we have
Substituting (3.8) and (3.25) in (3.14), we have
We can conclude that
According to condition (i) and (3.13), we get
Since \(P_{C}\) is a firmly nonexpansive mapping and using the same method as (3.21), we get
That is,
Substituting (3.8) and (3.27) in (3.14), we have
Therefore
From condition (i), (3.13) and (3.26), we get
Let \(k_{n} = au_{n}+ ( 1-a ) P_{C} ( I-d_{2}D_{2} ) u _{n}\). By using the same method as (3.19), we have
Substituting (3.29) in (3.14), we have
This implies that
According to condition (i) and (3.13), we have
By using the same method as (3.21), we have
That is,
Substituting (3.31) in (3.14), we have
This implies that
According to condition (i), (3.13) and (3.30), we get
we conclude that
By (3.24) and (3.34), we also conclude that
Afterward, we show that \(\limsup_{n \rightarrow \infty } \langle u-z,x_{n}-z \rangle \leq 0\), where \(z=P_{\mathcal{F}}u\).
To show this, choose a subsequence \(\{ x_{n_{j}} \} \) of \(\{ x_{n} \} \) such that
Without loss of generality, we may assume that \(x_{n_{j}} \rightharpoonup \omega \) as \(j \rightarrow \infty \). From (3.35), we obtain \(y_{n_{j}} \rightharpoonup \omega \) as \(j \rightarrow \infty \). From Lemma 2.3, we have \(VI ( C,D_{1} ) = F ( P_{C}(I-d _{1}D_{1}) ) \). Assume that \(\omega \notin VI ( C,D_{1} ) \), we have \(\omega \neq P_{C}(I-d _{1}D_{1})\omega \). Using Opial’s condition, (3.33), we obtain
This is a contradiction, so we have
From (3.24), we have \(u_{n_{j}} \rightharpoonup \omega \) as \(j \rightarrow \infty \). By (3.28) and using the same method as (3.37), we obtain
Next, we show that \(\omega \in \bigcap^{N}_{i=1} F ( T_{i} ) \). From Lemma 2.5, we have
Assume that \(\omega \notin \bigcap^{N}_{i=1} F ( T_{i} ) \), and that \(\omega \neq P_{C} ( I - \lambda_{n_{j}} ( \sum^{N}_{i=1}k _{i} ( I-T_{i} ) ) ) \omega \). Using Opial’s condition, (3.17) and (3.35), we obtain
This is a contradiction, so we have
After that, we show that \(\omega \in \Omega \). Assume \(\omega \notin EP(F_{1},f_{1})\). Since \(EP(F_{1},f_{1})=F(T^{F_{1}}_{r} ( I-rf _{1} ))\), we obtain \(\omega \neq T^{F_{1}}_{r} ( I-rf_{1} ) \omega \). Using Opial’s condition and (3.23), we get
This is a contradiction, so we have
Next, we show that \(A\omega \in EP(F_{2},f_{2})\). Since A is bounded linear operator so that \(Ax_{n_{j}} \rightharpoonup A\omega \) as \(j\rightarrow \infty \). Assume \(A\omega \notin EP(F_{2},f_{2})\). Since \(EP(F_{2},f_{2})=F(T^{F_{2}}_{s} ( I-sf_{2} ))\), we obtain \(A\omega \neq T^{F_{2}}_{s} ( I-sf_{s} ) A\omega \). Using Opial’s condition and (3.16), we have
We can conclude that \(\omega \in \Omega \). Therefore \(\omega \in \mathcal{F}\). Since \(x_{n_{j}} \rightharpoonup \omega \) as \(j\rightarrow \infty \), we have
Finally, we show that the sequence \(\{x_{n}\}\) converges strongly to \(z=P_{\mathcal{F}}u\). By (3.7), (3.9) and (3.11), we get
According to condition (i), (3.42) and Lemma 2.6, we can conclude that \(\{x_{n}\}\) converges strongly to \(z=P_{\mathcal{F}}u\). By (3.24) and (3.35), we have \(\{u_{n}\}\) and \(\{y_{n}\}\) converge strongly to \(z=P_{\mathcal{F}}u\). This completes the proof. □
These results are directly proved from Theorem 3.4. Therefore, we omit the proof.
Corollary 3.5
Let C and Q be nonempty closed convex subsets of a real Hilbert space \(H_{1}\) and \(H_{2}\), respectively. Let \(A:H_{1} \rightarrow H _{2}\) be a bounded linear operator. Let \(D_{1}, D_{2}:C \rightarrow H _{1}\) be α, β-inverse strongly monotone mappings, respectively. Let \(F_{1}:C \times C \rightarrow \mathbb{R}\) and \(F_{2}:Q \times Q \rightarrow \mathbb{R}\) be the bifunctions satisfying (A1)–(A4). Let T be a quasi-nonexpansive mapping of C into itself. Let \(f_{1}: H_{1} \rightarrow H_{1}\) be a ρ-inverse strongly monotone mapping and \(f_{2}: H_{2} \rightarrow H_{2}\) be a firmly nonexpansive mapping. Assume \(\mathcal{F}= VI(C,D_{1}) \cap VI(C,D _{2}) \cap F ( T ) \cap \Omega \neq \emptyset \). For given \(x_{1}\), \(u\in C\), and let \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) be sequences generated by
where \(d_{1} \in (0,2\alpha)\), \(d_{2} \in (0,2\beta)\), \(r \in (0,2 \rho)\), \(s \in (0,1)\), \(a \in [0,1]\), \(\gamma \in (0,1/L)\), L is the spectral radius of the operator \(A^{*}A\) and \(A^{*}\) is the adjoint of A. Also \(\{ \alpha_{n} \}\), \(\{ \beta_{n} \}\), \(\{ \gamma_{n} \}\) are sequences in \([0,1]\) with \(\alpha_{n} + \beta_{n} + \gamma_{n} = 1\) for all \(n \in \mathbb{N}\). Suppose the conditions (i)–(iv) of Theorem 3.4 hold. Then \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) converge strongly to \(z=P_{\mathcal{F}}u\).
Corollary 3.6
Let C be nonempty closed convex subset of a real Hilbert space \(H_{1}\). Let \(D_{1}, D_{2}:C \rightarrow H_{1}\) be α, β-inverse strongly monotone mappings, respectively. Let \(F_{1}:C \times C \rightarrow \mathbb{R}\) be the bifunction satisfying (A1)–(A4). Let \(\{ T_{i} \} ^{N}_{i=1}\) be a finite family of quasi-nonexpansive mappings of C into itself with \(\bigcap^{N}_{i=1} F ( T_{i} ) \neq \emptyset \). Let \(f_{1}: H_{1} \rightarrow H_{1}\) be a ρ-inverse strongly monotone mapping. Assume \(\mathcal{F}= VI(C,D_{1}) \cap VI(C,D_{2}) \cap \bigcap^{N}_{i=1} F ( T_{i} ) \cap EP(F_{1}, f_{1}) \neq \emptyset\). For given \(x_{1},u\in C\) and let \(\{ x_{n} \}, \{ u_{n} \}\) and \(\{ y_{n} \}\) be sequences generated by
where \(d_{1} \in (0,2\alpha)\), \(d_{2} \in (0,2\beta)\), \(r \in (0,2 \rho)\), \(a \in [0,1]\), \(0 < k_{i} < 1\) with \(\sum^{N}_{i=1}k_{i}=1\). Also \(\{ \alpha_{n} \}\), \(\{ \beta_{n} \}\), \(\{ \gamma_{n} \}\) are sequences in \([0,1]\) with \(\alpha_{n} + \beta_{n} + \gamma_{n} = 1\) for all \(n \in \mathbb{N}\). Suppose the conditions (i)–(iv) of Theorem 3.4 hold. Then \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) converge strongly to \(z=P_{\mathcal{F}}u\).
Corollary 3.7
Let C and Q be nonempty closed convex subsets of a real Hilbert space \(H_{1}\) and \(H_{2}\), respectively. Let \(A:H_{1} \rightarrow H _{2}\) be a bounded linear operator. Let \(D_{1}, D_{2}:C \rightarrow H _{1}\) be α, β-inverse strongly monotone mappings, respectively. Let \(F_{1}:C \times C \rightarrow \mathbb{R}\) and \(F_{2}:Q \times Q \rightarrow \mathbb{R}\) be the bifunctions satisfying (A1)–(A4). Let \(\{ T_{i} \} ^{N}_{i=1}\) be a finite family of quasi-nonexpansive mappings of C into itself with \(\bigcap^{N}_{i=1} F ( T_{i} ) \neq \emptyset \). Assume \(\mathcal{F}= VI(C,D_{1}) \cap VI(C,D_{2}) \cap \bigcap^{N}_{i=1} F ( T_{i} ) \cap \Gamma \neq \emptyset \). For given \(x_{1},u \in C\) and let \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) be sequences generated by
where \(d_{1} \in (0,2\alpha)\), \(d_{2} \in (0,2\beta)\), \(a \in [0,1]\), \(0 < k_{i} < 1\) with \(\sum^{N}_{i=1}k_{i}=1\), \(\gamma \in (0,1/L)\), L is the spectral radius of the operator \(A^{*}A\) and \(A^{*}\) is the adjoint of A. Also \(\{ \alpha_{n} \}\), \(\{ \beta_{n} \}\), \(\{ \gamma_{n} \}\) are sequences in \([0,1]\) with \(\alpha_{n} + \beta_{n} + \gamma_{n} = 1\) for all \(n \in \mathbb{N}\). Suppose the conditions (i)–(iv) of Theorem 3.4 hold. Then \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) converge strongly to \(z=P_{\mathcal{F}}u\).
Remark 3.8
If we take \(N=1\) in Theorem 3.4, we have a strong convergence for finding a common element of the set of solutions of variational inequality problems and the set of fixed points of a quasi-nonexpansive mapping and the set of solutions of the modified split generalized equilibrium problem. From previous result, we can apply by using the same method as Theorem 4.5 in [24]. We have a strong convergence for finding a common element of the set of solutions of variational inequality problems and the set of fixed points of a finite family of nonspreading mappings and the set of solutions of the modified split generalized equilibrium problem. By using our main result, Theorem 3.4 reduces to the Corollary 3.6, the solution of the generalized equilibrium problem and Corollary 3.7, the split equilibrium problem. All theorems are found as regards the solution of common fixed points of a finite family of quasi-nonexpansive mappings without assuming \(T_{\omega }:= (1-\omega)I+\omega T\) and T is demiclosed; a difficult proof in a framework of Hilbert space.
4 Application
The following knowledge is used to prove Theorem 4.4. A mapping \(T: C \rightarrow C\) is called nonspreading if
Such a mapping is defined by Kohsaka and Takahashi [25].
In 2009, Iemoto and Takahashi [26] proved that (4.1) is equivalent to
Remark 4.1
A nonspreading mapping T with \(F(T)\neq \emptyset \) is quasi-nonexpansive mapping T.
Lemma 4.2
([25])
Let H be a Hilbert space, let C be a nonempty closed convex subset of H, and let S be a nonspreading mapping of C into itself. Then \(F(S)\) is closed and convex.
In 2009, Kangtunyakarn and Suantai[27] introduced the S-mapping generated by \(T_{1},T_{2},T_{3},\ldots,T_{N}\) and \(\lambda _{1},\lambda_{2},\ldots,\lambda_{N}\) as follows.
Definition 4.1
Let C be a nonempty convex subset of a real Banach space. Let \(\{T_{i}\}_{i=1}^{N}\) be a finite family of (nonexpansive) mappings of C into itself. For each \(j=1,2,\ldots,N\), let \(\alpha_{j}=(\alpha_{1} ^{j}, \alpha_{2}^{j}, \alpha_{3}^{j})\in I\times I\times I\), where \(I\in [0,1]\) and \(\alpha_{1}^{j}+\alpha_{2}^{j}+\alpha_{3}^{j}=1\). Define the mapping \(S:C\rightarrow C\) as follows:
This mapping is called an S-mapping generated by \(T_{1}, T_{2}, \ldots, T_{N}\) and \(\alpha_{1}, \alpha_{2}, \ldots, \alpha_{N}\).
Lemma 4.3
([28])
Let C be a nonempty closed convex subset of a real Hilbert space. Let \(\{T_{i}\}_{i=1}^{N}\) be a finite family of nonspreading mappings of C into C with \(\bigcap_{i=1}^{N}F(T_{i}) \neq \emptyset \), and let \(\alpha_{j}=(\alpha_{1}^{j}, \alpha_{2}^{j}, \alpha_{3}^{j})\in I\times I\times I\), \(j=1, 2, \ldots, N\), where \(I=[0,1]\), \(\alpha_{1}^{j}+\alpha_{2}^{j}+\alpha_{3}^{j}=1\), \(\alpha_{1} ^{j}, \alpha_{3}^{j}\in (0,1)\) for all \(j=1, 2, \ldots, N-1\) and \(\alpha_{1}^{N}\in (0,1]\), \(\alpha_{3}^{N}\in [0,1)\), \(\alpha_{2}^{j} \in [0,1)\) for all \(j=1, 2, \ldots, N\). Let S be the mapping generated by \(T_{1}, T_{2}, \ldots, T_{N}\) and \(\alpha_{1}, \alpha_{2}, \ldots, \alpha _{N}\). Then \(F(S)=\bigcap_{i=1}^{N}F(T_{i})\) and S is a quasi-nonexpansive mapping.
By using these results, we obtain the following theorems.
Theorem 4.4
Let C and Q be nonempty closed convex subsets of a real Hilbert space \(H_{1}\) and \(H_{2}\), respectively. Let \(A:H_{1} \rightarrow H _{2}\) be a bounded linear operator. Let \(D_{1}, D_{2}:C \rightarrow H _{1}\) be α, β-inverse strongly monotone mappings, respectively. Let \(F_{1}:C \times C \rightarrow \mathbb{R}\) and \(F_{2}:Q \times Q \rightarrow \mathbb{R}\) be the bifunctions satisfying (A1)–(A4). Let \(\{T_{i}\}_{i=1}^{N}\) be a finite family of nonspreading mappings of C into C with \(\bigcap_{i=1}^{N}F(T_{i})\neq \emptyset \), and let \(\alpha_{j}=(\alpha_{1}^{j}, \alpha_{2}^{j}, \alpha_{3} ^{j})\in I\times I\times I\), \(j=1, 2, \ldots, N\), where \(I=[0,1], \alpha _{1}^{j}+\alpha_{2}^{j}+\alpha_{3}^{j}=1\), \(\alpha_{1}^{j}, \alpha_{3} ^{j}\in (0,1)\) for all \(j=1, 2, \ldots, N-1\) and \(\alpha_{1}^{N}\in (0,1]\), \(\alpha_{3}^{N}\in [0,1)\), \(\alpha_{2}^{j}\in [0,1)\) for all \(j=1, 2, \ldots, N\). Let S be the mapping generated by \(T_{1}, T_{2}, \ldots, T_{N}\) and \(\alpha_{1}, \alpha_{2}, \ldots, \alpha_{N}\). Let \(f_{1}: H_{1} \rightarrow H_{1}\) be a ρ-inverse strongly monotone mapping and \(f_{2}: H _{2} \rightarrow H_{2}\) be a firmly nonexpansive mapping. Assume \(\mathcal{F}= VI(C,D_{1}) \cap VI(C,D_{2}) \cap \bigcap^{N}_{i=1} F ( T_{i} ) \cap \Omega \neq \emptyset \). For given \(x_{1},u \in C\) and let \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) be sequences generated by
where \(d_{1} \in (0,2\alpha)\), \(d_{2} \in (0,2\beta)\), \(r \in (0,2 \rho)\), \(s \in (0,1)\), \(a \in [0,1]\), \(\gamma \in (0,1/L)\), L is the spectral radius of the operator \(A^{*}A\) and \(A^{*}\) is the adjoint of A. Also \(\{ \alpha_{n} \}\), \(\{ \beta_{n} \}\), \(\{ \gamma_{n} \}\) are sequences in \([0,1]\) with \(\alpha_{n} + \beta_{n} + \gamma_{n} = 1\) for all \(n \in \mathbb{N}\). Suppose the conditions (i)–(iv) of Theorem 3.4 hold. Then \(\{ x_{n} \}\), \(\{ u_{n} \}\) and \(\{ y_{n} \}\) converge strongly to \(z=P_{\mathcal{F}}u\).
Proof
By using Corollary 3.5 and Lemma 4.3, we obtain the conclusion. □
5 Example and numerical results
In this section, an example is given for supporting Theorem 3.4. In Example 5.1, we only instance an example in infinite dimensional Hilbert space for supporting Theorem 3.4. We omit the computer programming.
Example 5.1
Let \(H_{1} = H_{2} = C = Q = \ell_{2}\) be the linear space whose elements consist of all 2-summable sequences \((x_{1}, x_{2}, \ldots, x _{j}, \ldots)\) of scalars, i.e.,
with an inner product \(\langle \cdot, \cdot \rangle: \ell _{2} \times \ell_{2} \rightarrow \mathbb{R}\) defined by \(\langle x, y \rangle = \sum^{\infty }_{j=1}x_{j}y_{j}\) where \(x=\{x_{j}\} ^{\infty }_{j=1}\), \(y=\{y_{j}\}^{\infty }_{j=1} \in \ell_{2}\) and a norm \(\Vert \cdot \Vert : \ell_{2} \rightarrow \mathbb{R}\) defined by \(\Vert x \Vert _{2} = ( \sum^{\infty }_{j=1}|x_{j}|^{2} ) ^{\frac{1}{2}}\) where \(x=\{x_{j}\}^{\infty }_{j=1} \in \ell_{2}\). Let the mapping \(A : \ell_{2} \rightarrow \ell_{2}\) be defined by \(Ax = ( \frac{x_{1}}{3}, \frac{x_{2}}{3}, \ldots, \frac{x_{j}}{3}, \ldots ) \) for all \(x=\{x_{j}\}^{\infty }_{j=1} \in \ell_{2}\) and \(A^{*} : \ell_{2} \rightarrow \ell_{2}\) be defined by \(A^{*}z = ( \frac{z _{1}}{3}, \frac{z_{2}}{3}, \ldots, \frac{z_{j}}{3}, \ldots ) \) for all \(z=\{z_{j}\}^{\infty }_{j=1} \in \ell_{2}\). Let \(D_{1},D_{2} : \ell _{2} \rightarrow \ell_{2}\) be defined by \(D_{1}x = ( \frac{x_{1}}{6}, \frac{x_{2}}{6}, \ldots, \frac{x_{j}}{6}, \ldots ) \) and \(D_{2}x = ( \frac{x_{1}}{5}, \frac{x_{2}}{5}, \ldots, \frac{x_{j}}{5}, \ldots )\), \(\forall x=\{x_{j}\}^{\infty }_{j=1} \in \ell_{2}\), respectively. Let the mapping \(T_{i}: \ell_{2} \rightarrow \ell_{2}\) be defined by \(T_{i}x = ( \frac{3ix_{1}}{5i+1}, \frac{3ix _{2}}{5i+1}, \ldots, \frac{3ix_{j}}{5i+1}, \ldots )\), \(\forall x=\{x_{j} \}^{\infty }_{j=1} \in \ell_{2}\) and \(k_{i} = \frac{6}{7^{i}} + \frac{1}{N7^{N}}\) for every \(i = 1, 2, \ldots, N\). Let the mapping \(F_{1}, F_{2} : \mathbb{R}^{2}\times \mathbb{R}^{2} \rightarrow \mathbb{R}\) be defined by
and
Let the mapping \(f_{1}: \ell_{2} \rightarrow \ell_{2}\) be defined by \(f_{1}x = ( \frac{x_{1}}{5}, \frac{x_{2}}{5}, \ldots, \frac{x_{j}}{5}, \ldots )\), \(\forall x=\{x_{j}\}^{\infty }_{j=1} \in \ell_{2}\) and the mapping \(f_{2}: \ell_{2} \rightarrow \ell_{2}\) be defined by \(f_{2}x = ( \frac{x_{1}}{7}, \frac{x_{2}}{7}, \ldots, \frac{x _{j}}{7}, \ldots )\), \(\forall x=\{x_{j}\}^{\infty }_{j=1} \in \ell _{2}\). Let \(r=1\) and \(s=0.5\). Since \(L=\frac{1}{9}\), we choose \(\gamma =0.5\). Let \(x_{1}=(x_{1}^{1}, x_{1}^{2}, \ldots, x_{1}^{j}, \ldots)\) and \(u=(u_{1}, u_{2}, \ldots, u_{j}, \ldots)\in \ell_{2}\) and let the sequences \(\{ x_{n} \} \), \(\{ y_{n} \} \) and \(\{ u _{n} \} \) be generated by (3.6) as follows:
for all \(n\geq 1\), where \(x_{n}=(x_{n}^{1}, x_{n}^{2}, \ldots, x_{n}^{j}, \ldots), y_{n}=(y_{n}^{1}, y_{n}^{2}, \ldots, y_{n}^{j}, \ldots)\) and \(u_{n}=(u_{n}^{1}, u_{n}^{2}, \ldots, u_{n}^{j}, \ldots)\). It easy to see that \(D_{1}\), \(D_{2}\), \(T_{i}\), \(F_{1}\), \(F_{2}\), \(f_{1}\) and \(f_{2}\) satisfy Theorem 3.4. Moreover, we have \(VI(C,D_{1}) \cap VI(C,D_{2}) \cap \bigcap^{N}_{i=1} F ( T_{i} ) \cap \Omega =\{0\}\), where \(\rho =d_{1}=d_{2}=1\). From Theorem 3.4, we can conclude that the sequences \(\{ x_{n} \}\), \(\{ y_{n} \}\) and \(\{ u_{n} \}\) converge strongly to 0.
In Example 5.2, we give computer programming to support our main result.
Example 5.2
Let \(H_{1} = H_{2} = C = Q = \mathbb{R}^{2}\) be the two-dimensional Euclidean space of the real number with an inner product \(\langle \cdot, \cdot \rangle: \mathbb{R}^{2} \times \mathbb{R}^{2} \rightarrow \mathbb{R}\) be defined by \(\langle x, y \rangle = x \cdot y = x_{1}y_{1}+x_{2}y_{2}\) where \(x=(x_{1}, x_{2}) \in \mathbb{R}^{2}\) and \(y=(y_{1}, y_{2}) \in \mathbb{R}^{2}\) and a usual norm \(\Vert \cdot \Vert : \mathbb{R}^{2} \rightarrow \mathbb{R}\) be defined by \(\Vert x \Vert = \sqrt{x_{1}^{2}+x _{2}^{2}}\) where \(x=(x_{1}, x_{2}) \in \mathbb{R}^{2}\). Let the mapping \(A : \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}\) be defined by \(Ax = (2x_{1}-x_{2}, x_{1}+2x_{2})\) for all \(x=(x_{1}, x_{2}) \in \mathbb{R}^{2}\) and \(A^{*} : \mathbb{R}^{2} \rightarrow \mathbb{R} ^{2}\) be defined by \(A^{*}z = (2z_{1}-z_{2}, 2z_{2}-z_{1})\) for all \(z=(z_{1}, z_{2}) \in \mathbb{R}^{2}\). Let \(D_{1},D_{2} : \mathbb{R} ^{2} \rightarrow \mathbb{R}^{2}\) be defined by \(D_{1}x = ( \frac{x _{1}}{6}, \frac{x_{2}}{6} ) \) and \(D_{2}x = ( \frac{x_{1}}{2}, \frac{x_{2}}{3} )\), \(\forall x = (x_{1}, x_{2}) \in \mathbb{R}^{2}\), respectively. Let the mapping \(T_{i}: \mathbb{R} ^{2} \rightarrow \mathbb{R}^{2}\) be defined by \(T_{i}x = ( \frac{3ix _{1}}{3i+1}, \frac{3ix_{2}}{3i+2}{} )\), \(\forall x = (x_{1}, x _{2}) \in \mathbb{R}^{2}\) and \(k_{i} = \frac{6}{7^{i}} + \frac{1}{N7^{N}}\) for every \(i = 1, 2, \ldots, N\). Let the mapping \(F_{1}, F_{2} : \mathbb{R}^{2}\times \mathbb{R}^{2} \rightarrow \mathbb{R}\) be defined by
and
Let the mapping \(f_{1}: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}\) be defined by \(f_{1}x = ( \frac{x_{1}}{5}, \frac{x_{2}}{5} )\), \(\forall x = (x_{1}, x_{2})\in \mathbb{R}^{2}\) and the mapping \(f_{2}: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}\) be defined by \(f_{2}x = ( \frac{x_{1}}{7}, \frac{x_{2}}{7} )\), \(\forall x = (x_{1}, x_{2})\in \mathbb{R}^{2}\). Let \(r=1\) and \(s=0.5\), the sequences \(z_{n}= (z_{n}^{1}, z_{n}^{2})\), \(x_{n}=(x_{n}^{1}, x_{n}^{2})\), \(u_{n}=(u _{n}^{1}, u_{n}^{2})\), \(y=(y_{1}, y_{2})\in \mathbb{R}^{2}\). By the definition of \(f_{1}\) and \(f_{2}\), we get
Let \(G_{1}(y_{1})= ( y_{1} ) ^{2}+ ( -x_{n}^{1}+ \frac{6}{5}z_{n}^{1} ) y_{1}+x_{n}^{1}z_{n}^{1}-\frac{11}{5} ( z_{n}^{1} ) ^{2}\) and \(G_{2}(y_{2})= ( y_{2} ) ^{2}+ ( -x _{n}^{2}+\frac{6}{5}z_{n}^{2} ) y_{2}+x_{n}^{2}z_{n}^{2}- \frac{11}{5} ( z_{n}^{2} ) ^{2}\). \(G_{1}(y_{1})\) and \(G_{2}(y_{2})\) are quadratic functions with coefficients \(a_{1} =1\), \(b_{1} = -x_{n}^{1}+\frac{6}{5}z_{n}^{1}\), and \(c_{1} = x_{n}^{1}z _{n}^{1}-\frac{11}{5} ( z_{n}^{1} ) ^{2}\) of \(G_{1}(y_{1})\) and coefficients \(a_{2} =1\), \(b_{2} = -x_{n}^{2}+\frac{6}{5}z_{n}^{2}\), and \(c_{2} = x_{n}^{2}z_{n}^{2}-\frac{11}{5} ( z_{n}^{2} ) ^{2}\) of \(G_{2}(y_{2})\), respectively. Determine the discriminant \(\Delta_{1}\) of \(G_{1}\) as follows:
We know that \(G_{1}(y_{1}) \geq 0\), \(\forall y \in \mathbb{R}\). If it has most one solution in \(\mathbb{R}\), then \(\Delta_{1} \leq 0\), so we obtain \(z_{n}^{1} = \frac{5x_{n}^{1}}{16}\). Next, we determine the discriminant \(\Delta_{2}\) of \(G_{2}\) by using the same method as above, we obtain \(z_{n}^{2} = \frac{5x_{n}^{2}}{16}\). That is \(T^{F_{1}}_{r} ( I-rf _{1} ) z_{n}= ( \frac{5x_{n}^{1}}{16}, \frac{5x_{n}^{2}}{16} ) \). After that, we find the solution of \(u_{n}= ( u_{n}^{1},u_{n}^{2} ) \) in this inequality \(0 \leq F_{2} ( u_{n},y ) + \langle f_{2} ( u_{n} ), y-u_{n} \rangle + \frac{1}{s} \langle y-u_{n}, u_{n}-x_{n} \rangle \). By using the same method as \(z_{n}= (z_{n}^{1}, z_{n} ^{2})\), we obtain
That is, \(T^{F_{2}}_{s} ( I-sf_{2} ) u_{n}= ( \frac{7x _{n}^{1}}{51}, \frac{7x_{n}^{2}}{51} ) \).
Let \(x_{1}=(x_{1}^{1}, x_{1}^{2})\) and \(u=(u_{1}, u_{2})\in \mathbb{R}^{2}\). The sequences \(\{ x_{n} \} \), \(\{ y_{n} \} \) and \(\{ u_{n} \} \) are generated by (3.6), where \(k_{i}=\frac{6}{7^{i}}+ \frac{1}{N7^{N}}\), \(d_{1}=1\), \(d_{2}=1\), \(a=0.5\), \(\alpha_{n}=\frac{1}{2n}\), \(\beta_{n}=\frac{7n-4}{12n}\), \(\gamma_{n}=\frac{5n-2}{12n}\) and \(\lambda_{n}=\frac{1}{2n^{2}}\) for all \(n \in \mathbb{N}\). Since \(L=5\), we choose \(\gamma =0.1\). From the definition of \(D_{1}\), \(D_{2}\), \(T_{i}\), \(F_{1}\), \(F_{2}\), \(f_{1}\) and \(f_{2}\), we have \(VI(C,D_{1}) \cap VI(C,D _{2}) \cap \bigcap^{N}_{i=1} F ( T_{i} ) \cap \Omega =\{0\}\). From Theorem 3.4, we can conclude that the sequences \(\{ x_{n} \}\), \(\{ y_{n} \}\) and \(\{ u_{n} \}\) converge strongly to 0. We can rewrite (3.6) as follows:
for all \(n\geq 1\), where \(x_{n}=(x_{n}^{1}, x_{n}^{2})\), \(y_{n}=(y_{n} ^{1}, y_{n}^{2})\) and \(u_{n}=(u_{n}^{1}, u_{n}^{2})\).
Table 1 shows the values of sequences \(\{ x _{n} \} \), \(\{ y_{n} \} \) and \(\{ u_{n} \} \) where \(u=(5,-5)\), \(x_{1}=(5,-5)\) and \(n = 30\).
6 Conclusion
-
1.
Example 5.1 is an example in infinite dimensional Hilbert space for supporting Theorem 3.4
-
2.
Table 1 and Fig. 1 in Example 5.2 show that the sequences \(\{x_{n}\}\), \(\{y_{n}\}\) and \(\{u_{n}\}\) converge to 0, where \(\{ 0 \} = VI(C,D_{1}) \cap VI(C,D_{2}) \cap \bigcap^{N}_{i=1} F ( T_{i} ) \cap \Omega \).
Figure 1 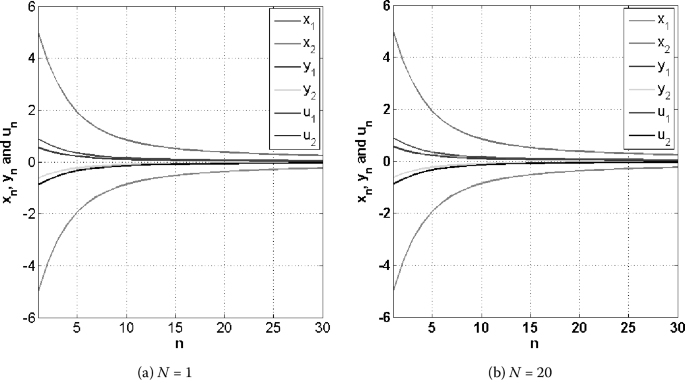
The convergence comparison with different values N
-
3.
Theorem 3.4 guarantees the convergence of \(\{x_{n}\}\), \(\{y_{n}\}\) and \(\{u_{n}\}\) in Example 5.1 and Example 5.2.
-
4.
By using the concept of Picard iteration, Wang [13] defined the iterative scheme \(\{x_{n}\}\) for solving SCFPP as follows:
$$\begin{aligned} x_{n+1} &=x_{n}-\rho_{n} \bigl( ( I-U ) x_{n}+A^{*}(I-T)Ax_{n} \bigr) \\ &= \bigl( I-\rho_{n} \bigl( ( I-U ) +A^{*}(I-T)A \bigr) \bigr) x _{n}, \end{aligned}$$(6.1)where \(\rho _{n}\) is according to (1.4) and U and T are firmly quasi-nonexpansive mappings. Then the sequence \(\{x_{n}\}\) converges weakly to z, where \(z=\lim_{n \rightarrow \infty }P_{\Phi }x_{n}\). In Theorem 3.4, we use the concept of Halpern iteration and suitable conditions of the parameters \(d_{1}\), \(d_{2}\), r, s, a, γ, L, \(\{ \alpha _{n} \}\), \(\{ \beta _{n} \}\) and \(\{ \gamma _{n} \}\), the sequence \(\{x_{n}\}\) defined by (3.6) converges strongly to \(z=P_{\mathcal{F}}u\), which is a different method from (6.1).

References
Goebel, K., Reich, S.: Uniform Convexity. Hyperbolic Geometry, and Nonexpansive Mappings. Marcel Dekker, New York (1984)
Ceng, L.C., Wang, C.Y., Yao, J.C.: Strong convergence theorems by a relaxed extragradient method for a general system of variational inequalities. Math. Methods Oper. Res. 67, 375–390 (2008)
Kangtunyakarn, A.: An iterative algorithm to approximate a common element of the set of common fixed points for a finite family of strict pseudo-contractions and of the set of solutions for a modified system of variational inequalities. Fixed Point Theory Appl. 2013, 143 (2013)
Blum, E., Oettli, W.: From optimization and variational inequalities to equilibrium problems. Math. Stud. 63(14), 123–145 (1994)
Kim, J.K., Buong, N.: A new iterative method for equilibrium problems and fixed point problems for infinite family of nonself strictly pseudocontractive mappings. Fixed Point Theory Appl. 2013, 286 (2013)
Takahashi, W., Wong, N.C., Yao, J.C.: Iterative common solutions for monotone inclusion problems, fixed point problems and equilibrium problems. Fixed Point Theory Appl. 2012, 181 (2012)
Kassay, G., Reich, S., Sabach, S.: Iterative methods for solving systems of variational inequalities in reflexive Banach spaces. SIAM J. Optim. 21, 1319–1344 (2011)
Reich, S., Sabach, S.: Three strong convergence theorems regarding iterative methods for solving equilibrium problems in reflexive Banach spaces. Contemp. Math. 568, 225–240 (2012)
Censor, Y.: A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 8, 221–239 (1994)
Byrne, C.: Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 18, 441–453 (2002)
Censor, Y., Gibali, A., Reich, S.: Algorithms for the split variational inequality problem. Numer. Algorithms 59, 301–323 (2012)
Moudafi, A.: Split monotone variational inclusions. J. Optim. Theory Appl. 150, 275–283 (2011)
Wang, F.: A new method for split common fixed-point problem without priori knowledge of operator norms. J. Fixed Point Theory Appl. 19, 2427–2536 (2017)
Gibali, A.: A new split inverse problem and application to least intensity feasible solutions. Pure Appl. Funct. Anal. 2(2), 243–258 (2017)
Censor, Y., Bortfeld, T., Martin, B., Trofimov, A.: A unified approach for inversion problems in intensity modulated radiation therapy. Phys. Med. Biol. 51, 2353–2365 (2006)
Combettes, P.L.: The convex feasibility problem in image recovery. Adv. Imaging Electron Phys. 95, 155–453 (1996)
Byrne, C.: Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 18, 441–453 (2002)
Tian, M., Jin, X.: A general iterative method for quasi-nonexpansive mappings in Hilbert space. J. Inequal. Appl. 2012, 38 (2012)
Reich, S.: A limit theorem for projections. Linear Multilinear Algebra 13, 281–290 (1983)
Opial, Z.: Weak convergence of the sequence of successive approximation of nonexpansive mappings. Bull. Am. Math. Soc. 73, 591–597 (1967)
Combettes, P.L., Hirstoaga, S.A.: Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 6(1), 117–136 (2005)
Takahashi, W.: Nonlinear Functional Analysis. Yokohama Publishers, Yokohama (2000)
Xu, H.K.: An iterative approach to quadric optimization. J. Optim. Theory Appl. 116, 659–678 (2003)
Cheawchan, K., Kangtunyakarn, A.: Approximation method for fixed points of nonlinear mapping and variational inequalities with application. Thai J. Math. 13(3), 653–672 (2015)
Kohsaka, F., Takahashi, W.: Fixed point theorems for a class of nonlinear mappings related to maximal monotone operators in Banach spaces. Arch. Math. 91, 166–177 (2008)
Iemoto, S., Takahashi, W.: Approximating common fixed points of nonexpansive mappings and nonspreading mappings in a Hilbert space. Nonlinear Anal. 71, 2082–2089 (2009)
Kangtunyakarn, A., Suantai, S.: Hybrid iterative scheme for generalized equilibrium problems and fixed point problems of finite family of nonexpansive mappings. Nonlinear Anal. Hybrid Syst. 3, 296–309 (2009)
Kangtunyakarn, A.: Strong convergence of the hybrid method for a finite family of nonspreading mappings and variational inequality problem. Fixed Point Theory Appl. 2012, 188 (2012)
Acknowledgements
This paper was supported by the Royal Golden Jubilee (RGJ) Ph.D. Programme, the Thailand Research Fund (TRF), under Grant No. PHD/0082/2558 and the Research and Innovation Services of King Mongkut’s Institute of Technology Ladkrabang.
Author information
Authors and Affiliations
Contributions
The two authors contributed equally to the writing of this paper. Both authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Cheawchan, K., Kangtunyakarn, A. The modified split generalized equilibrium problem for quasi-nonexpansive mappings and applications. J Inequal Appl 2018, 122 (2018). https://doi.org/10.1186/s13660-018-1716-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13660-018-1716-9